Ймовірно, кожен прямо або побічно користувався GPS-приймачами. Вони зустрічаються у більшості смартфонів, багатьох нових автомобілях, застосовуються в комерційних цілях по всьому світу. Ці крихітні пристрої можуть миттєво і абсолютно безкоштовно визначити точне місце розташування і час майже в будь-якій точці планети. Все, що для цього потрібно, – наявність самого GPS-приймача, а вони з кожним днем стають дешевше і менше.
Однак не слід приймати ці невеликі і недорогі модулі як належне. На те, щоб завжди і скрізь мати можливість точно визначити місце розташування, пішли десятиліття інженерних розробок. З кінця 70-х запускалися десятки GPS-супутників, кожен з яких обладнаний прецизійними атомними годинами, і вони продовжують регулярно виводитися на навколоземну орбіту. Вони безперервно посилають дані на Землю по наданим радіочастотним каналах. Кишенькові GPS-приймачі обладнані крихітними антенами і процесорами, які безпосередньо приймають сигнал, надісланий супутниками, і на льоту обчислюють положення і час.
Як працює GPS?
Для визначення положення і часу майже в будь-якому місці Землі використовується орбітальне угруповання і наземні станції. На висоті понад 19 тис. км над Землею постійно розгорнуто щонайменше 24 активних супутника. Їх позиції розраховані таким чином, щоб в небі над будь-якою точкою планети завжди перебувала рівно половина з них. Основною метою супутників є передача інформації на Землю на частотах в діапазоні 1,1–1,5 ГГц. З допомогою цих даних і математичних розрахунків наземний приймач або модуль GPS обчислювати своє місце розташування і поточний час.
У 2010 р. була відновлена альтернативна система глобального позиціонування ГЛОНАСС. Вона також нараховує 24 супутника і веде мовлення на частотах 1,2–1,6 ГГц.

Канали
Число каналів, з якими працює GPS-модуль, впливає на час першого виправлення (TTFF). Оскільки невідомо, які супутники знаходяться в полі зору, чим більше частот можна перевірити відразу, тим швидше буде проведена корекція. Після встановлення зв’язку або отримання виправлення деякі модулі відключають додаткові канали для економії енергії. Якщо користувач не проти того, щоб трохи довше почекати, 12 або 14 каналів достатньо для відмінної роботи приймача.
Трилатерация
Це математичний метод, використовуваний для обчислення позиції з кількома контрольними точками. Щоб GPS-приймач міг вирахувати точне місце розташування і час, він повинен встановити зв’язок принаймні з 4 супутниками. Для обчислення відстані до об’єкта методом тріангуляції потрібні 2 точки. Але у випадку GPS потрібно визначити значення 4 – широту, довготу, висоту і час.
Визначення місця і часу
Дані, передані на Землю з кожного супутника, містять кілька різних фрагментів інформації, які дозволяють GPS-приймача точно розрахувати своє місце розташування і час. Важливим елементом обладнання на кожному з них є надзвичайно точні атомні годинники. Дані про час надсилаються на Землю разом з орбітальним положенням і часом прибуття в різні точки орбіти. Іншими словами, GPS-модуль отримує тимчасову мітку від усіх видимих супутників, а також інформацію про їх місцезнаходження. З цих даних можна обчислити відстань до кожного з них. Якщо антена бачить не менше 4 супутників, то можна точно розрахувати положення приймача.
Є ще сторона глобальної системи позиціонування. Поряд з перерахованими елементами існують наземні станції, які можуть взаємодіяти з мережею супутникового та окремими приймачами GPS. Така система називається сегментом управління і підвищує точність вимірювань. Її прикладами є WAAS і DGPS. Перша використовується більшістю приймачів і знижує помилку до 5 м. Друга вимагає наявності ресивера певного типу і забезпечує сантиметрову похибка. Пристрої даного типу дорогі і мають тенденцію бути більш великими, оскільки вимагають додаткової антени.

Точність геопозиціонування
Похибка вимірювань приймача GPS або GLONASS залежить від ряду змінних, в першу чергу від відношення сигнал/шум, положення супутника, погодних умов та наявності перешкод, таких як будівлі і гори. Ці фактори можуть створювати помилки розрахунку місця розташування користувача. Шум зазвичай створює помилку від 1 до 10 м. Гори, будівлі і інші предмети, які можуть перешкоджати проходженню сигналу від супутника, можуть викликати в 3 рази більшу помилку. Для нормальної роботи GPS-приймач повинен мати можливість приймати сигнал від 4 супутників. Зв’язок з першим з них дозволяє отримати дані про альманах і, отже, доступності інших. Хоча і можна визначити місцезнаходження і з меншим, ніж 4, числом супутників, похибка вимірювань може бути досить великою. Саме точне позиціонування відбувається, коли є відкритий огляд ясного неба, вільний від будь-яких перешкод, c більш ніж 4 супутниками над головою. Для боротьби з цими помилками створено кілька допоміжних засобів.
Assisted GPS
Однією з таких допоміжних систем є Assisted GPS і AGPS. Цей метод використовує бездротові (наземні) мережі для ретрансляції сигналу супутника, коли він слабкий або його неможливо прийняти. AGPS допомагає у двох речах. По-перше, надає одержувачу дані альманаху і точний час. І по-друге, використовує більш високу обчислювальну потужність і хороший супутниковий сигнал наземної бази для інтерпретації одержуваної фрагментованою інформації, щоб забезпечити більш достовірне визначення місця розташування. AGPS в основному здійснюється зовнішніми GPS-приймачами, встановленими на вежі стільникового зв’язку. Зв’язок з ними дозволяє швидше налаштуватися на супутник, а також отримати більш точну інформацію. Цей метод використовується GPS-приймачах для «Андроїда» в мобільних телефонах. Ось чому смартфони часто бувають точніше спеціалізованих продуктів. AGPS присутня в камерах, геодезичних GPS-приймачах і деяких автомобілях. Його використання найбільш вигідно в містах, де сигнал в лабіринті будівель іноді досить важко прийняти.

Диференціальний GPS
Іншим методом є диференціальна система геопозиціонування DGPS. Дана система визначення місцеположення також використовує наземні станції. Однак вона відрізняється тим, що знаходить різницю між показаннями супутника і приймача. Станції можуть знаходитися на відстані до 370 км від ресивера, і важливо відзначити, що в міру віддалення від них точність вимірювань погіршується. DGPS здійснюється наземною станцією, що передає сигнал, який диктує помилку між фактичною і виміряної псевдодальністю. Це значення розраховується шляхом множення швидкості світла на час проходження сигналу із супутника на приймач.
Прикладом одного з видів DGPS є система широкого радіусу дії WAAS. Спочатку вона була розроблена для допомоги авіаційним GPS-приймачів. У WAAS використовується система спеціально побудованих наземних станцій. Передбачений набір стандартів точності, яким вимірювання повинні відповідати. В горизонтальному і вертикальному напрямках в 95% випадків їх похибка не повинна перевищувати 7,6 м. Наземні станції відправляють свої вимірювання на головні станції, які посилають виправлення на супутники WAAS кожні 5 секунд або частіше. З супутника сигнал транслюється назад на приймачі на Землі, де скориговані дані використовуються для підвищення точності GPS. В деяких місцях WAAS може забезпечити похибку до 1 м по горизонталі і 1,5 м по вертикалі. Хоча WAAS присутній тільки в Північній Америці, подібні системи існують в багатьох інших частинах світу.

Формати повідомлень
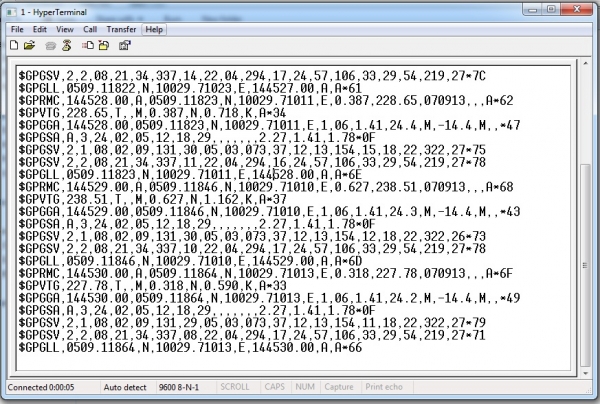
GPS-дані відображаються в різних форматах через послідовний інтерфейс. Існують стандартні і нестандартні (власні) формати повідомлень. Майже всі GPS-приймачі виводять дані NMEA. Це стандарт форматування інформації у вигляді рядків, які називаються пропозиціями. Кожне з них містить різні дані, розділені комами. Всього налічується 19 видів таких пропозицій. Ось приклад NMEA-рядки, отриманої від приймача, встановив зв’язок із супутником:
$GPGGA,235317.000,4003.9039,N,10512.5793,W,1,08,1.6,1577.9,M,-20.7,М,,0000*5F.
У реченні міститься наступна інформація:
- час за Гринвічем: 23:53:17;
- широта: північна, 40,039039°;
- довгота: західна, 10,5125793°;
- кількість супутників: 08;
- висота: 1577 м.
Дані розділяються комами, щоб спростити читання і аналіз комп’ютерами і мікроконтролерами. Вони відправляються на послідовний порт з інтервалом, званим швидкістю оновлення. Більшість ресиверів оновлюють цю інформацію один раз в секунду (тобто з частотою 1 Гц), але кращі GPS-приймачі, здатні виконувати кілька оновлень в секунду. Для сучасних моделей це значення дорівнює 5-20 Гц.
Читання даних
Більшість модулів GPS обладнані послідовним портом, який дозволяє підключити їх до мікроконтролера або комп’ютера.
Після включення пристрою дані NMEA (або повідомлення в іншому форматі) відправляються з послідовного передавального роз’єму (TX) з певною швидкістю передачі і швидкістю оновлення, навіть при відсутності прийому з супутника. Щоб мікроконтролер зчитував інформацію, необхідно підключити висновок TX GPS до входу RX. Щоб налаштувати модуль, потрібно підключити його вхід RX до виходу TX пристрою управління.
Мікроконтролер зазвичай аналізує дані NMEA. Розбір пропозиції здійснюється шляхом простого виділення з нього частини інформації.
Наприклад, мікроконтролеру потрібно прочитати тільки висоту GPS. Замість того, щоб мати справу з усім текстом, він аналізує пропозицію GPGGA і вибирає тільки висоту. Як тільки необхідна інформація буде відібрана, нею можна маніпулювати, щоб виконувати інші дії.
Платформа Arduino також може легко аналізувати дані NMEA з допомогою бібліотеки Tiny GPS.

Підключення до комп’ютера
Простим способом безпосереднього перегляду даних NMEA є використання GPS-приймача для ноутбука або комп’ютера. Для створення з’єднання необхідно лише підключити пристрій геопозиціонування і підключити висновок TX зовнішнього модуля до входу RX комп’ютера.
Також можливе підключення GPS-приймача до USB-порту. При цьому він може харчуватися як від власного джерела, так і через з’єднання з ПК. У першому випадку звільнилася лінія використовується для виявлення наявності підключення USB-GPS-приймача до хосту. При з’єднанні з комп’ютером харчування надходить через універсальну послідовну шину, тому додаткового джерела не потрібно.
Крім того, Bluetooth-GPS-приймач забезпечує бездротовий зв’язок як з ПК, так і з сумісними пристроями того ж виробника. Це дозволяє проводити швидкий обмін загальними даними, такими як маршрути і шляхові точки.
Після підключення необхідно відкрити програму послідовного терміналу, встановивши швидкість передачі, рівної швидкості GPS-модуля. Навіть якщо приймач не встановив зв’язок із супутником, на екрані з’явиться потік NMEA-пропозицій.
Налаштування ресивера
Для налаштування приймача GPS і ГЛОНАСС важливо знати тип чіпсета, що в ньому встановлено. Набір мікросхем містить потужний процесор, який відповідає за користувальницький інтерфейс, всі обчислення, а також аналогові схеми антени. Крім того, чіпсет дозволяє приймати дані для налаштування таких параметрів, як швидкість оновлення, швидкість передачі, вибір пропозиції і т. д.
Щоб відправити команду на приймач через послідовний порт, знадобиться набір команд або довідкове керівництво. Але перед тим як занурюватися у вивчення команд для конкретного модуля, необхідно перевірити наявність програмного забезпечення, яке значно полегшує роботу з пристроєм і його налаштування.
Деякі чіпсети дозволяють використовувати альтернативні протоколи, такі як бінарний SiRF, UBX або власні повідомлення. Ці протоколи містять аналогічну інформацію, але обмінюються даними у вигляді двійкового (замість ASCII) коду для більш швидкого зв’язку.
При комунікації з GPS-приймачем команди повинні завершуватися контрольною сумою. У більшості випадків для цього для кожної пропозиції потрібно виконати команду XOR.
Антена
Найменший GPS-модуль отримує сигнали від супутників, віддалених на відстань 19 тис. км, які розташовані не тільки над головою, але і в будь-якому місці на небі. Для кращої продуктивності між антеною і супутниками потрібна пряма видимість. Погода, хмари, снігові бурі не повинні впливати на сигнал, але дерева, будівлі, гори, дах над головою будуть створювати небажані перешкоди, і точність GPS від цього постраждає.
Розроблено багато варіантів антен. Одним з найпоширеніших є керамічна патч-антена. Вона відрізняється низьким профілем, дешевизною і компактністю, але, в порівнянні з іншими типами, приймає гірше. Щоб отримати хороший сигнал, вона повинна бути спрямована вгору на відкрите небо, тобто коли посилення максимальне.
У деяких GPS-модулях використовуються гвинтові антени. Вони займають більше місця, але їх форма дозволяє отримати кращий сигнал в будь орієнтації за рахунок більш низького посилення.
В деяких модулях застосовуються SMA-антени. Це дає можливість монтувати їх у місцях, відмінних від місця розташування самого приймача, що стане в нагоді у випадках, коли основна система не має доступу до відкритого неба (наприклад, в приміщенні або автомобілі).